Tidak ada produk di keranjang.
Apa Fungsi Encoder? Perbandingan Encoder Incremental vs Absolute
Di pabrik, gerakan presisi itu bukan “bonus”—itu syarat hidup mesin. Saat servo bergerak 0,2 mm terlalu jauh, produk bisa reject. Saat sumbu tidak tahu posisinya setelah listrik mati, mesin bisa butuh homing lama, atau lebih buruk: tabrakan.
Di sinilah industrial encoder berperan. Encoder adalah “mata” dari motion control systems—ia mengubah gerakan mekanik menjadi sinyal listrik supaya drive, PLC, dan controller bisa mengontrol posisi, kecepatan, dan arah dengan stabil.
Artikel ini menjawab dua pertanyaan yang paling sering muncul di lapangan:
Encoder itu sebenarnya “ngapain” di sistem?
Kapan harus memilih incremental encoder, dan kapan harus memilih absolute encoder?
1) Encoder Itu Apa, dan Kenapa Ia Penting di Otomasi Industri?
Secara fungsi, encoder mengubah gerakan menjadi informasi yang bisa dibaca sistem kontrol:
Posisi: sumbu sekarang ada di mana
Kecepatan: bergerak seberapa cepat
Arah: maju/mundur (CW/CCW)
Stabilitas loop servo: apakah motor mengikuti perintah atau “lari sendiri”
Di dunia industrial automation products dan factory automation solutions, encoder bukan sekadar komponen sensor—encoder menentukan apakah sistem closed-loop bisa bekerja dengan benar. Tanpa feedback encoder, servo drive seperti mengemudi dalam kabut: bisa jalan, tapi tidak tahu sudah benar atau belum.
2) “Tanpa Encoder, Mesin Masih Jalan Kan?” — Jalan, Tapi Tidak Presisi
Kalau aplikasi kamu hanya butuh ON/OFF sederhana, mungkin cukup limit switch. Tapi begitu masuk ke:
CNC axis positioning
robot joint / rotary table
packaging line high-speed indexing
aplikasi yang butuh repeatability
…maka encoder berubah dari “opsional” menjadi “inti sistem”.
Tanpa encoder, kamu biasanya akan melihat gejala seperti:
posisi drift (semakin lama semakin melenceng),
hunting / vibrasi servo,
kualitas hasil tidak konsisten,
commissioning lama dan gampang error.
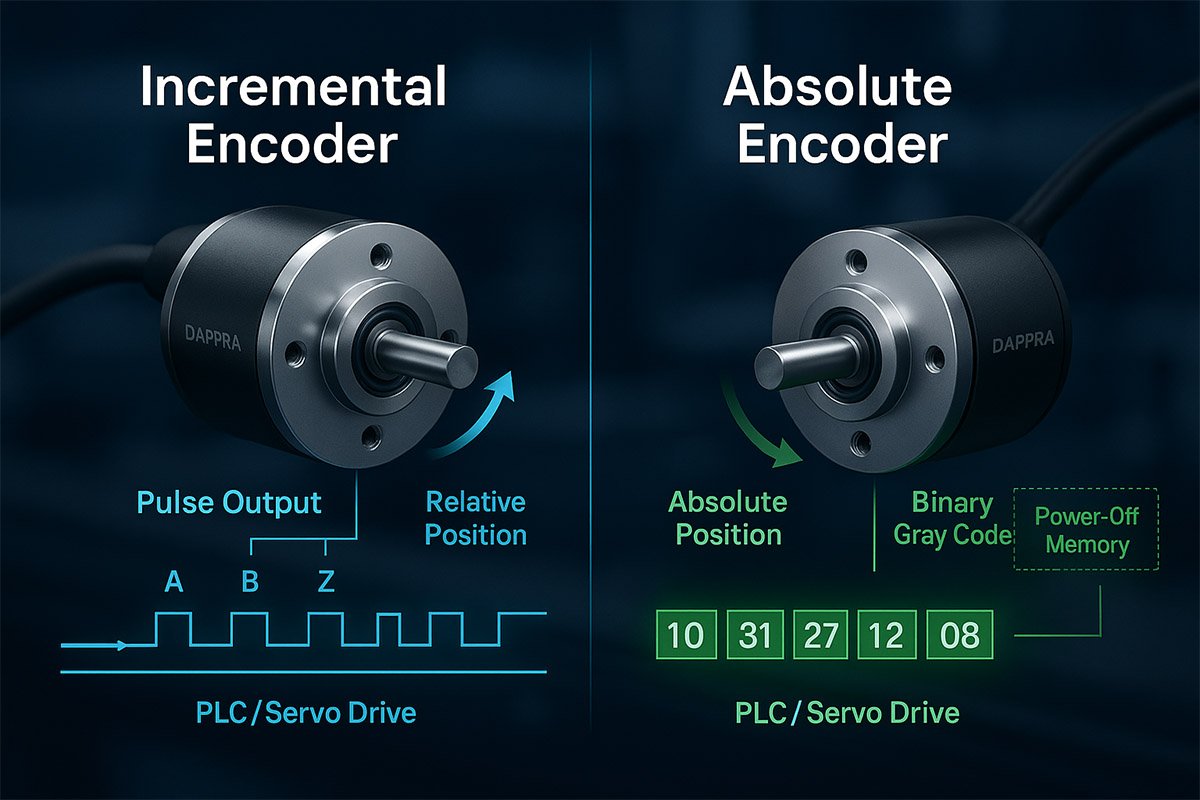
3) Encoder Incremental: Sinyal A/B/Z dan Filosofi “Hitung Pulsa”
Cara kerja singkat
Incremental encoder tidak memberi “angka posisi absolut”. Ia memberi pulsa. Sistem menentukan posisi dengan menghitung pulsa.
Struktur sinyal yang umum
A channel: pulsa utama
B channel: pulsa dengan beda fase 90° dari A (untuk arah)
Z channel (index): satu pulsa referensi per putaran
Apa konsekuensinya?
Saat listrik mati, hitungan hilang → posisi tidak “diingat”.
Setelah power on, sistem sering butuh homing (cari home switch atau cari index Z).
Itulah alasan banyak mesin dengan incremental encoder punya ritual awal:
nyala → homing → baru bisa produksi.
Kapan incremental cocok?
feedback kecepatan (conveyor, roller, feeder)
counting / relative movement
aplikasi yang homing-nya cepat dan aman
4) Encoder Absolute: Setiap Posisi Punya “ID”, Jadi Tidak Kehilangan Posisi
Kalau incremental adalah “menghitung langkah”, absolute encoder adalah “membaca koordinat”.
Cara kerja singkat
Absolute encoder mengeluarkan kode posisi unik untuk setiap posisi. Saat listrik mati, saat nyala lagi, ia tetap bisa menunjukkan posisi saat ini—tanpa harus mengulang dari nol.
Bentuk output yang umum
kode biner/Gray (lebih klasik)
serial protocol modern seperti SSI, BiSS, CANopen, EtherCAT, PROFINET
Apa konsekuensinya?
Startup lebih cepat (sering tanpa homing)
Safety strategy lebih mudah karena posisi diketahui sejak awal
Tapi sinyal dan integrasinya lebih kompleks, dan biasanya biaya lebih tinggi
Kapan absolute cocok?
CNC dan robot (posisi harus aman dan repeatable)
aplikasi yang restart-nya sering dan downtime mahal
sistem yang tidak toleran terhadap “posisi tidak diketahui”
5) Perbandingan Praktis: Incremental vs Absolute (Bukan Teori, Tapi Keputusan Engineering)
Berikut cara melihatnya seperti engineer commissioning:
Kalau power cycle membuat mesin “lupa posisi” dan kamu harus homing panjang → kamu sedang hidup di dunia incremental.
Kalau kamu butuh sistem “bangun tidur langsung tahu posisi” → itu pekerjaan absolute.
Ringkasnya:
Incremental: sederhana, ekonomis, bagus untuk speed & relative position
Absolute: posisi aman, startup efisien, cocok untuk presisi & safety
6) Single-Turn vs Multi-Turn Absolute: Jangan Salah Pilih Level
Setelah memilih absolute, masih ada pilihan:
Single-turn
hanya tahu posisi dalam 1 putaran (0–360°)
cocok untuk rotary application yang tidak perlu menghitung revolusi
Multi-turn
tahu posisi 0–360° dan jumlah putaran
penting untuk screw drive/axis yang bergerak jauh atau rotary yang bisa berputar berkali-kali
Di lapangan, salah memilih single-turn untuk aplikasi yang butuh multi-turn akan membuat mesin “terlihat benar” saat dekat home, tapi kacau setelah beberapa siklus.
7) Interface Encoder dan Kompatibilitas: Sering Jadi Sumber Masalah Tersembunyi
Banyak proyek gagal bukan karena encoder “jelek”, tapi karena tidak cocok dengan drive/PLC.
Incremental yang umum
TTL / HTL (level sinyal berbeda, perilaku noise berbeda)
Absolute yang umum
SSI, BiSS
CANopen
EtherCAT, PROFINET
Prinsipnya: encoder harus bicara bahasa yang dipahami drive/PLC. Kalau tidak, commissioning jadi mimpi buruk: error komunikasi, reading tidak stabil, atau data tidak masuk sama sekali.
8) Failure Mode Encoder yang Paling Sering: Setengahnya Bukan Encodernya
Di lingkungan factory automation, encoder sangat sering “dituduh” padahal pelakunya:
encoder cable yang shielding-nya putus
konektor longgar karena getaran
routing kabel encoder sejajar dengan kabel VFD/servo power
kabel tidak drag-chain rated lalu putus halus di dalam
termination shield “pigtail” terlalu panjang dan berubah jadi antena
Kalau kamu seorang integrator atau maintenance engineer, ini pola yang berulang:
ganti encoder → masalah hilang sebentar → balik lagi.
Karena akar masalahnya bukan di head encoder, tapi di cable/connector/EMI.
9) Dua Cerita Lapangan: Cara Engineer Mengambil Keputusan Encoder
Kasus 1 — Conveyor Counting yang “Kadang Melompat”
Sebuah conveyor packaging memakai incremental encoder untuk menghitung produk. Saat VFD naik speed, hitungan kadang meloncat (overcount). Operator mengira encoder rusak.
Apa yang terjadi di lapangan:
kabel encoder ditarik sejajar dengan kabel motor VFD dalam tray yang sama
shield tidak diterminasi dengan baik
konektor tidak dikunci rapat
Solusi yang benar bukan mengganti encoder mahal, tapi:
pisahkan jalur power vs signal
rapikan grounding/shielding
pastikan locking konektor dan strain relief
Hasilnya: counting stabil, downtime turun—tanpa ganti encoder.
Kasus 2 — CNC Axis “Selalu Homing Lama” Setelah Power Off
Sebuah CNC retrofit memakai incremental encoder. Setiap listrik mati mendadak, produksi berhenti karena harus homing ulang dan operator takut tabrakan.
Di sini, absolute encoder menjadi keputusan strategis:
mesin bisa tahu posisi sejak awal (lebih aman)
startup lebih cepat
risiko crash turun
Biaya encoder lebih tinggi, tapi biaya downtime dan risiko kerusakan mekanik jauh lebih mahal.
10) Cara Memilih Encoder: Framework yang Bisa Dipakai di Lapangan
Langkah 1 — Tentukan kebutuhan posisi
cukup relative? → incremental
butuh posisi tetap diketahui setelah power off? → absolute
Langkah 2 — Tentukan kebutuhan startup dan safety
homing boleh lama dan aman?
ada risiko tabrakan kalau posisi tidak diketahui?
Kalau risikonya tinggi, absolute sering lebih masuk akal.
Langkah 3 — Pastikan kompatibilitas controller/drive
interface apa yang didukung?
protocol dan parameter cocok?
Langkah 4 — Evaluasi lingkungan instalasi
EMI tinggi (VFD/servo drive)?
kabel panjang?
ada drag-chain atau torsion?
Kalau ya, prioritaskan shielded cable, konektor yang benar, dan routing yang disiplin.
Checklist Cepat Sebelum Kamu Finalkan Pilihan
Untuk Incremental Encoder
homing logic tersedia dan aman?
pulse frequency sesuai limit PLC/drive?
A/B/Z wiring benar dan arah sesuai?
Untuk Absolute Encoder
protocol didukung drive/PLC?
single-turn atau multi-turn?
kebutuhan safety saat power-up jelas?
Untuk Keduanya (Instalasi)
kabel encoder shielded dan sesuai aplikasi?
routing jauh dari power/VFD?
konektor terkunci, ada strain relief, tidak ketarik?
Kesimpulan
Encoder menentukan lebih dari sekadar akurasi. Encoder menentukan:
perilaku startup,
strategi safety,
kecepatan commissioning,
dan reliability jangka panjang sistem motion control.
Incremental cocok untuk aplikasi yang sederhana, ekonomis, dan bisa homing dengan aman.
Absolute cocok untuk aplikasi presisi, startup cepat, dan sistem yang tidak boleh “lupa posisi”.
Dan di banyak kasus, keberhasilan encoder bukan hanya pada head encoder—tapi pada kabel, konektor, shielding, dan routing yang rapi. Itulah kenapa dalam proyek nyata, memilih encoder sering harus dipikirkan sebagai paket automation components lengkap, bukan satu komponen saja.
“In motion control systems, encoder selection defines not only accuracy, but also startup behavior, safety strategy, and long-term reliability.”
— DAPPRA AUTOMATION Technical Engineering Team






















Tambah komentar
Anda harus masuk untuk berkomentar.